СЕРИЈА ЕЛЕКТРИЧНИ СТРАПЧИ HITBOT – Z-EFG-20F Паралелна електрична држач



Главна категорија
Индустриска роботска рака / Колаборативна роботска рака / Електричен држач / Интелигентен актуатор / Решенија за автоматизација
Апликација
Роботските држачи од серијата SCIC Z-EFG се мали со вграден серво систем, што овозможува прецизна контрола на брзината, положбата и силата на стегање. Најсовремениот систем за држачи SCIC за решенија за автоматизација ќе ви овозможи да отворите нови можности за автоматизирање на задачи за кои никогаш не сте мислеле дека се можни.

Карактеристика
● Контрола на прецизноста на силата, брзо стегање на кршливи предмети
● Прецизна контрола на силата, брзо стегање
● Брзо движење и кршливо стегање
● Мала фигура, погодна за интегрирање
● Интегрирано управување и меко стегање на контролерот
● Режими со повеќекратна контрола Лесни за ракување
Силата, бит и брзината можат да се контролираат со Modbus
Брзо отворање/затворање
Времето на движење на еден удар е 0,1 секунда
Мала големина
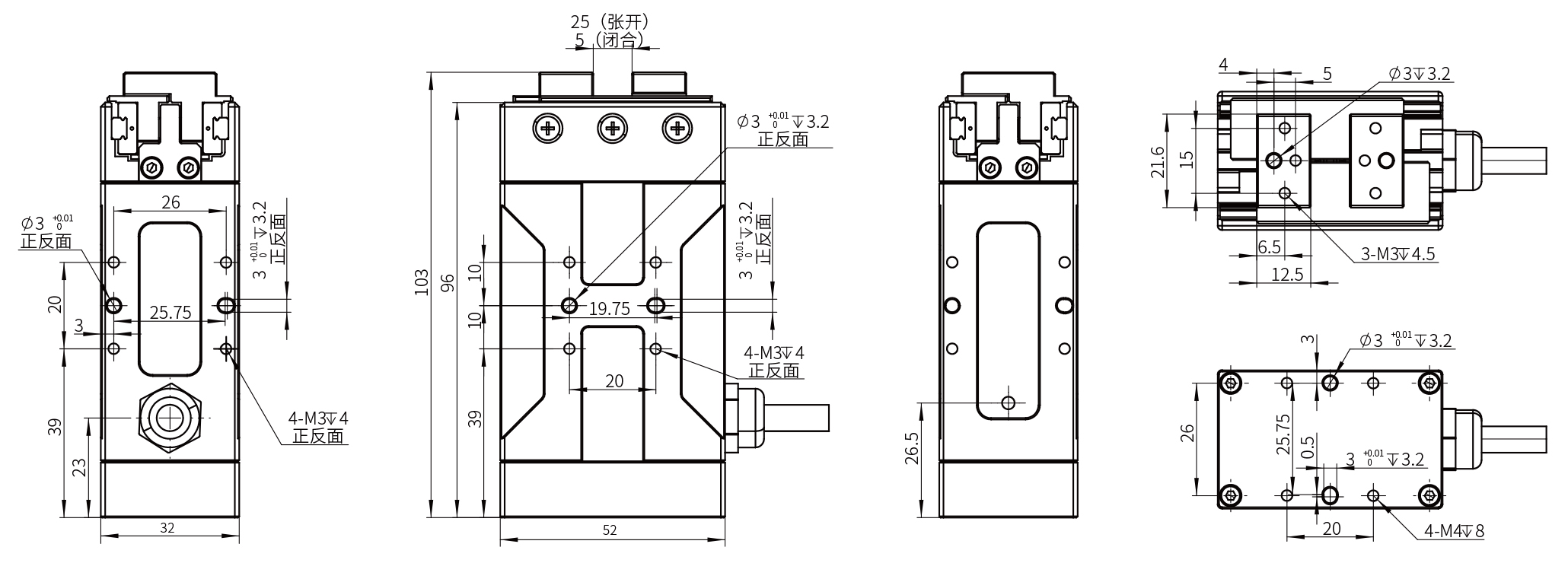
Неговата големина е 52 * 32 * 103 мм
Високопрецизна контрола на силата
±0,3N контрола на силата со голема прецизност, силата е 1-8N.
Контролерот е вграден
Мал простор зафаќа, лесен за интегрирање
Контролен режим
За поддршка на 485 (Modbus RTU) и I/O контрола
Меко стегање
Може да стегне кршливи предмети

● Промовирање на револуција во замена на пневматските држачи со електрични држачи, прва електрична држач со интегриран серво систем во Кина.
● Совршена замена за компресор за воздух + филтер + соленоиден вентил + вентил за гас + пневматска дршка
● Повеќе циклуси на работа, во согласност со традиционалниот јапонски цилиндар




Спецификација Параметар
| Модел бр. Z-EFG-20F | Параметри |
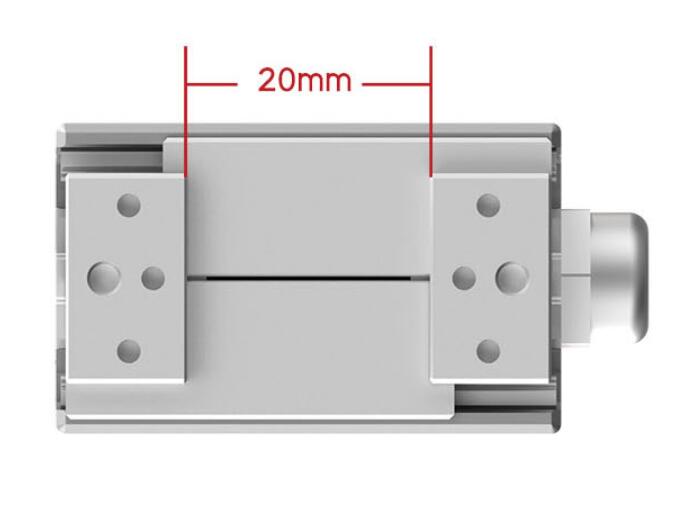
| Вкупен мозочен удар | 20 мм прилагодлив |
| Сила на зафаќање | 1-8N прилагодлив |
| Повторливост | ±0,02 мм |
| Препорачана тежина на држење | ≤0,1 кг |
| Режим на пренос | Решетка за запчаници + линеарна водилка |
| Надополнување на маснотиите на подвижните компоненти | На секои шест месеци или 1 милион движења / време |
| Време на еднонасочно движење на потег | 0,1 секунди |
| Режим на движење | Два прста се движат хоризонтално |
| Тежина | 0,5 кг |
| Димензии (Д*Ш*В) | 52*32*103мм |
| Работен напон | 24V ± 10% |
| Номинална струја | 0,4A |
| Врвна струја | 1A |
| Моќ | 10W |
| Класа на заштита | IP20 |
| Тип на мотор | DC безчеткици |
| Работен температурен опсег | 5-55℃ |
| Опсег на работна влажност | RH35-80 (Без мраз) |
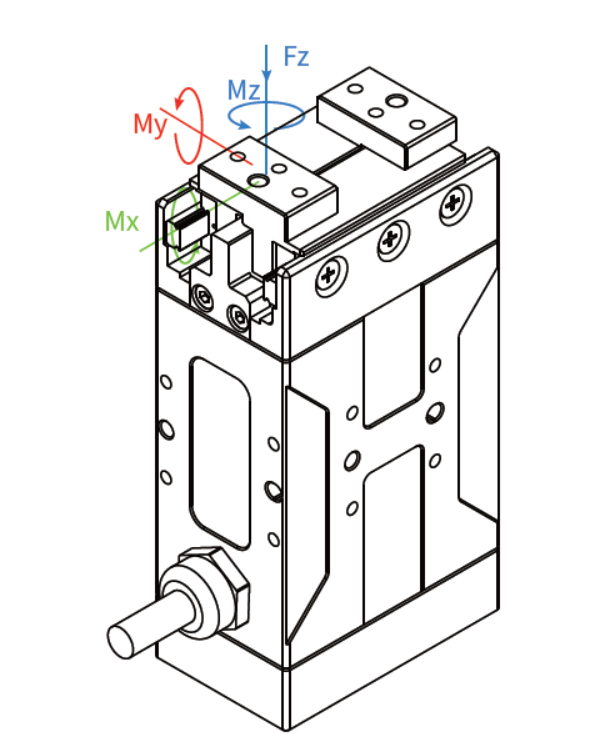
| Дозволено статичко оптоварување во вертикална насока | |
| Фз: | 120N |
| Дозволен вртежен момент | |
| Mx: | 0,6 Nm |
| Моето: | 1 Нм |
| Мз: | 1 Нм |
Прецизна контрола на силата, брзо стегање
Електричната држач Z-EFG-20F треба да усвои посебен дизајн на менувачот и компензација на алгоритмот за возење, нејзиниот вкупен ход достигна 20 mm, силата на стегање е 1-8N.

Брзо движење и кршливо стегање
Дебелината на овој електричен држач е само 32 мм, едностраното растојание на обратен удар е само 0,1 секунда, може да се сретне за да се произведе во мал простор, брзо и стабилно за стегање.
Мала фигура, погодна за интегрирање

Големината на Z-EFG-20F е Д52 * Ш32 * В103 мм, неговата структура е компактна, за да поддржува повеќекратни флексибилни методи на инсталација, неговиот контролер е вграден, зафаќа мала просторија, што може лесно да се справи со разни задачи за стегање.

Интегрирано управување и меко стегање на контролерот
Неговата сила на стегање, бит и брзина се контролирани, опашката стегач може лесно да се менува, клиентот може да ги стегне предметите на барање, да ја дизајнира опашката стегач и да го одржи електричниот држач способен да ја заврши задачата за стегање во најголема мера.
Режими со повеќекратна контрола Лесни за ракување
Конфигурацијата на електричната држач Z-EFG-20F е едноставна, има изобилство на контролни режими, за поддршка на 485 (Modbus RTU) и I/O bus-mastering, потребен е само еден кабел, може да се дебагира и да се користи од софтвер.

Поместување на тежиштето на товарот
Нашиот бизнис


Категории на производи
-

DH ROBOTICS СЕРВО ЕЛЕКТРИЧНА СТРАШАЧКА PGC СЕРИЈА –...
-

Колаборативен роботски држач – ISC Inner S...
-

DH ROBOTICS СЕРВО ЕЛЕКТРИЧНА СТРАПАЧКА PGE СЕРИЈА –...
-

DH ROBOTICS СЕРВО ЕЛЕКТРИЧНА СТРАПАЧКА PGE СЕРИЈА –...
-

СЕРИЈА НА ЕЛЕКТРИЧНИ СТРАПЧИ HITBOT – Z-EFG-C6...
-

DH ROBOTICS СЕРВО ЕЛЕКТРИЧНА СТРАПАЧКА RGI СЕРИЈА –...