СЕРИЈА ЕЛЕКТРИЧНИ ФРИЗЕРИ HITBOT – Z-EFG-C50 Колаборативен електричен држач




Главна категорија
Индустриска роботска рака / Колаборативна роботска рака / Електричен држач / Интелигентен актуатор / Решенија за автоматизација
Апликација
Роботските држачи од серијата SCIC Z-EFG се мали со вграден серво систем, што овозможува прецизна контрола на брзината, положбата и силата на стегање. Најсовремениот систем за држачи SCIC за решенија за автоматизација ќе ви овозможи да отворите нови можности за автоматизирање на задачи за кои никогаш не сте мислеле дека се можни.

Функција

· Детекција на пад на држачот, функција за излез на површина
· Силата, положбата и брзината можат прецизно да се контролираат преку Modbus
·Долг век на траење: десетици милиони циклуси, надминувајќи ги воздушните канџи
· Вграден контролер: мал отпечаток, лесна интеграција
·Контролен режим: 485 (Modbus RTU), I/O
Моторен удар 50 mm, сила на стегање 140N, компатибилен со роботска рака со 6 оски.
Висока фреквенција
Најкраткото време на удар е 0,5 секунди
Висока прецизност
Повторливоста е ±0,03 mm
Висок товар
Препорачана тежина на стегање ≤2 кг
Вклучи и пушти
Електричен држач специјално за 6-оска роботска рака
Опашката е променлива
Неговата опашка е променлива, погодна за разни барања
Сила на меко стегање
Може да стегне кршливи и деформирани предмети

● Промовирање на револуција во замена на пневматските држачи со електрични држачи, прва електрична држач со интегриран серво систем во Кина.
● Совршена замена за компресор за воздух + филтер + соленоиден вентил + вентил за гас + пневматска дршка
● Повеќе циклуси на работа, во согласност со традиционалниот јапонски цилиндар



Спецификација Параметар
| Модел бр. Z-EFG-C50 | Параметри |
| Вкупен мозочен удар | 50 мм прилагодлив |
| Сила на зафаќање | 40-140N прилагодлив |
| Повторливост | ±0,03 мм |
| Препорачана тежина на држење | ≤2 кг |
| Режим на пренос | Решетка за запчаници + Сферична водилка |
| Надополнување на маснотиите на подвижните компоненти | На секои шест месеци или 1 милион движења / време |
| Време на еднонасочно движење на удар | 0,5 секунди |
| Режим на движење | Два прста се движат хоризонтално |
| Тежина | 1 кг |
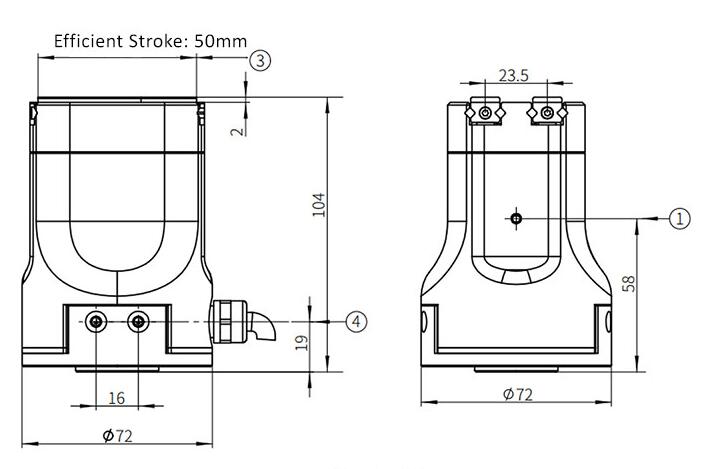
| Димензии (Д*Ш*В) | 72*72*143мм |
| Работен напон | 24V ± 10% |
| Номинална струја | 0,8A |
| Врвна струја | 2A |
| Моќ | 20W |
| Класа на заштита | IP20 |
| Тип на мотор | DC безчеткици |
| Работен температурен опсег | 5-55℃ |
| Опсег на работна влажност | RH35-80 (Без мраз) |

| Дозволено статичко оптоварување во вертикална насока | |
| Фз: | 300N |
| Дозволен вртежен момент | |
| Mx: | 7 Nm |
| Моето: | 7 Nm |
| Мз: | 7 Nm |
Интегрирано возење и контролер
Електричната држач Z-EFG-C50 има интегриран серво систем внатре, нејзиниот вкупен ход е 50 mm, силата на стегање е 40-140N, неговиот ход и силата на стегање се прилагодливи, а нејзината повторување е ± 0,03 mm.

Компатибилен со шестоосна роботска рака

Електричната фатничка може да биде компатибилна со 6-оска роботска рака, за да се реализира „plug and play“, нејзиното најкратко време на удар е само 0,5 секунди, што може да ги задоволи барањата за стегање за стабилна производствена линија.
Мала големина, флексибилна за инсталација

Z-EFG-C50 е да го усвои режимот на пренос на решетка за запчаници + топчеста водилка, големината на производот е L72 * W72 * H143mm, може да биде флексибилна за распоредување во услови на мала површина.


Брза реакција, точност за контрола на силата

Најкраткото време на еден удар е само 0,5 секунди, може да се справи со задачата за брзо стегање, неговите делови од опашката може да се менуваат во секое време, а клиентите можат да ги прилагодат опашките според потребите.
Мултиплицирачки режими на контрола, лесен за ракување

Конфигурацијата на Z-EFG-C50 е едноставна, има изобилство на контролни режими, вклучувајќи 485 (Modbus RTU), Pulse, I/O и е компатибилна со главниот контролен систем на PLC.

Поместување на тежиштето на товарот
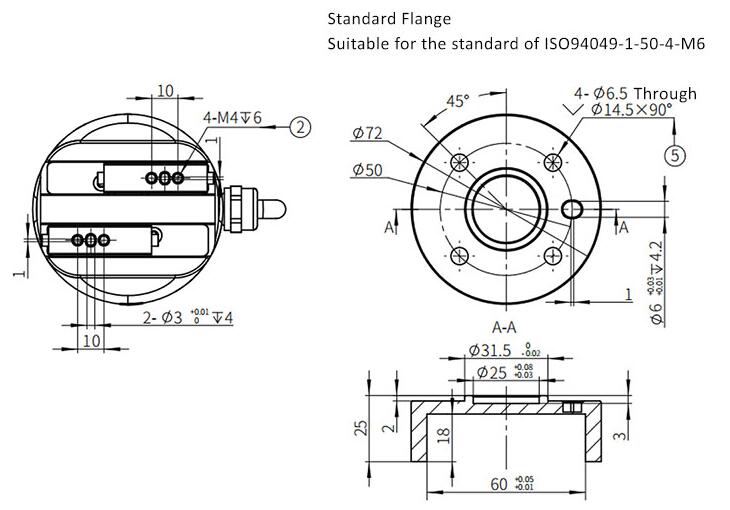
1. LED индикатор
2. Место за инсталација, користете 4 завртки M4
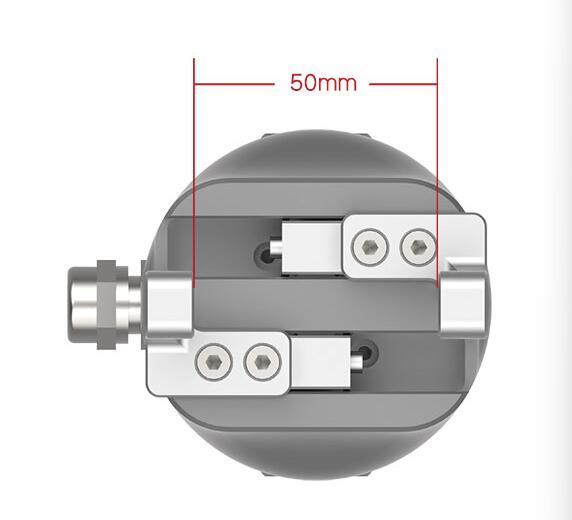
3. Мозочниот удар на електричниот држач е 50 мм
4. Оутлет за навртки
5. Место за инсталација, користете 4 завртки M6 за да поврзете со прирабницата на терминалот на раката на колаборативниот робот
Нашиот бизнис


Категории на производи
-

DH ROBOTICS СЕРВО ЕЛЕКТРИЧНА СТРАПАЧКА RGI СЕРИЈА –...
-

DH ROBOTICS СЕРВО ЕЛЕКТРИЧНА СТАПКА CG СЕРИЈА – ...
-

DH ROBOTICS СЕРВО ЕЛЕКТРИЧНА СТРАПАЧКА RGI СЕРИЈА –...
-

DH ROBOTICS СЕРВО ЕЛЕКТРИЧНА СТРАШАЧКА PGC СЕРИЈА –...
-

DH ROBOTICS СЕРВО ЕЛЕКТРИЧНА СТРАПАЧКА PGE СЕРИЈА –...
-

СЕРИЈА HITBOT ELECTRIC GRIPPER – Z-EFG-12 Paral...